Zadowolony
- Co to jest silnik elektryczny?
- Budowa silnika elektrycznego
- Zasada działania
- Typ silnika
- Wspólna charakterystyka silnika
- Obrotowy moment obrotowy
- Moc silnika
- Sprawność silnika elektrycznego
- Prędkość nominalna
- Moment bezwładności
- Naprężenie znamionowe
- Elektryczna stała czasowa
- Podstawowe wzory do obliczania mocy silnika
- Wniosek
W elektromechanice istnieje wiele siłowników, które pracują ze stałym obciążeniem bez zmiany prędkości obrotowej. Stosowane są w urządzeniach przemysłowych i domowych takich jak wentylatory, sprężarki i inne. Jeśli wartości znamionowe nie są znane, do obliczeń stosuje się wzór na moc silnika. Obliczenia parametrów są szczególnie istotne dla nowych i mniej znanych napędów. Obliczenia opierają się na wykorzystaniu specjalnych czynników i doświadczeniach z podobnymi maszynami. Dane te są potrzebne do prawidłowe działanie układy elektryczne.

Co to jest silnik elektryczny?
Silnik elektryczny to urządzenie, które zamienia energię elektryczną na energię mechaniczną. Działanie większości urządzeń zależy od oddziaływania pola magnetycznego na uzwojenie wirnika, co wyraża się jego obrotem. Pracują z zasilaczami prądu stałego lub zmiennego. Możliwość zasilania z akumulatora, inwertera lub z gniazdka sieciowego. W niektórych przypadkach silnik pracuje odwrotnie, tzn. zamienia energię mechaniczną na elektryczną. Zespoły takie są powszechnie stosowane w elektrowniach zasilanych strumieniem powietrza lub wody.

Silniki elektryczne są klasyfikowane według rodzaju zasilania, budowy wewnętrznej, zastosowania i mocy. Napędy AC mogą być również wyposażone w specjalne szczotki. Pracują na napięciach jedno-, dwu- lub trójfazowych, są chłodzone powietrzem lub cieczą. Wzór na moc dla silnika prądu zmiennego
P = U x I,
Gdzie P - moc, U - napięcie, I - prąd.
Napędy ogólnego przeznaczenia, dzięki swoim wymiarom i charakterystyce, znajdują zastosowanie w przemyśle. Największy Silniki o mocach powyżej 100 megawatów stosowane są w elektrowniach na statkach, kompresorowniach i przepompowniach. Mniejsze są stosowane w urządzeniach domowych, takich jak odkurzacz czy wentylator.
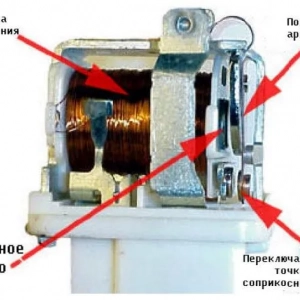
Budowa silnika elektrycznego
Zespół napędowy składa się z:
- Rotor.
- Stator.
- Łożyska.
- Szczelina powietrzna.
- Nawijanie.
- Komutator.
Wirnik jest jedyną ruchomą częścią napędu i obraca się wokół swojej osi. Prąd płynący przez przewodniki tworzy w uzwojeniu zaburzenie indukcyjne. Wytworzone pole magnetyczne oddziałuje na magnesy stałe stojana, które napędzają wał. Oblicza się je za pomocą wzoru na prąd wyjściowy silnika, dla którego przyjmuje się sprawność i współczynnik mocy, z uwzględnieniem wszystkich charakterystyk dynamicznych wału.

Łożyska znajdują się na wale wirnika i pomagają obracać go wokół osi. Część zewnętrzna jest przymocowana do obudowy silnika. Wał przechodzi przez nie i na zewnątrz. Ponieważ obciążenie wykracza poza zakres pracy łożysk, nazywane jest obciążeniem poprzecznym.
Stojan jest elementem stałym w obwodzie elektromagnetycznym silnika. Może zawierać uzwojenia lub magnesy stałe. Rdzeń stojana wykonany jest z cienkich metalowych płytek zwanych pakietem armaturowym. Został on zaprojektowany w celu zmniejszenia strat energii, które często występują w przypadku prętów pełnych.

Szczelina powietrzna to odległość między wirnikiem a stojanem. Mała szczelina jest skuteczna, ponieważ wpływa na niski współczynnik wydajności silnika. Prąd magnesujący rośnie wraz ze wzrostem szerokości szczeliny. Dlatego też jest on zawsze utrzymywany w jak najmniejszym stopniu, ale w rozsądnych granicach. Zbyt małe odstępy prowadzą do tarcia i luzowania się elementów mocujących.
Uzwojenie składa się z drutu miedzianego połączonego w jedną cewkę. Zazwyczaj ułożone wokół miękkiego namagnesowanego rdzenia składającego się z kilku warstw metalu. Wzbudzenie pola indukcyjnego następuje w momencie przepływu prądu przez przewody uzwojenia. W tym momencie instalacja przechodzi w tryb konfiguracji z biegunami jawnymi i ukrytymi. W pierwszym przypadku pole magnetyczne maszyny jest wytwarzane przez uzwojenie wokół zacisków biegunowych. W drugim przypadku pole rozłożone rozprasza szczeliny w końcówce biegunowej wirnika. Silnik z zacienionymi biegunami jest wyposażony w uzwojenie, które zatrzymuje zakłócenia magnetyczne.
Komutator służy do przełączania napięcia wejściowego. Składa się z pierścieni kontaktowych umieszczonych na wale i izolowanych od siebie. Prąd twornika jest doprowadzany do szczotek styków komutatora obrotowego, co powoduje odwrócenie biegunowości i obrót wirnika od bieguna do bieguna. W przypadku braku silnik przestaje się obracać. Nowoczesne maszyny wyposażone są w dodatkowe elementy elektroniczne, które kontrolują proces rotacji.

Zasada działania
Zgodnie z prawem Archimedesa prąd w przewodniku tworzy pole magnetyczne, w którym działa siła F1. Jeśli z tego przewodnika zrobimy metalową ramkę i umieścimy ją w polu pod kątem 90°, to na krawędziach wystąpią siły skierowane w przeciwnych kierunkach do siebie. Generują one moment obrotowy na osi, który rozpoczyna jej obrót. Uzwojenia armatury wytwarzają stały skręt. Pole jest generowane przez magnesy elektryczne lub stałe. Pierwsza wersja została zaprojektowana jako cewka nawinięta na stalowy rdzeń. W ten sposób prąd ramowy wytwarza w zwoju elektromagnesu pole indukcyjne, które wytwarza siłę elektromotoryczną.

Przyjrzyjmy się bliżej działaniu silników asynchronicznych na przykładzie układów z wirnikiem fazowym. Maszyny te pracują na prądzie zmiennym o prędkości armatury, która nie jest równa tętnieniu pola magnetycznego. Dlatego są one również nazywane indukcyjnymi. Wirnik jest napędzany przez oddziaływanie prądu elektrycznego w cewkach na pole magnetyczne.
Gdy w cewce pomocniczej nie ma napięcia, urządzenie znajduje się w stanie spoczynku. Z chwilą indukowania prądu elektrycznego w zaciskach stojana powstaje pole magnetyczne o pulsacji +F i -F, które jest stałe w przestrzeni. Można go przedstawić jako następujący wzór
npr = nob = f1 × 60 ÷ p = n1
gdzie:
npr - to liczba obrotów pola magnetycznego w kierunku do przodu, r/min;
nobwodowy - to liczba obrotów pola w kierunku przeciwnym, obr;
f1 - częstotliwość prądu tętniącego, Hz;
p jest liczbą biegunów;
n1 - całkowita liczba obrotów na minutę.
Poprzez doświadczanie pulsacji pola magnetycznego, wirnik otrzymuje ruch początkowy o wartości. z powodu niejednorodnego działania strumienia, rozwinie on moment obrotowy. Zgodnie z prawem indukcji, w zwartym uzwojeniu powstaje siła elektromotoryczna, która generuje prąd. Jego częstotliwość jest proporcjonalna do poślizgu wirnika. Oddziaływanie prądu elektrycznego z polem magnetycznym powoduje powstanie momentu obrotowego wału o wartości.
Istnieją trzy wzory na obliczenie wydajności asynchronicznego silnika elektrycznego. W zakresie przesunięcia fazowego należy użyć
S = P ÷ cos (alfa), gdzie:
S - moc całkowita, mierzona w Volt-Amperach.
P - moc czynna, podawana w watach.
alfa - przesunięcie fazowe.
Moc całkowita odnosi się do wartości rzeczywistej, a moc czynna do wartości projektowej.
Typ silnika
Napędy są skategoryzowane według źródła zasilania:
- Prąd stały.
- AC.
Przez zasada działania Są one z kolei podzielone na:
- Kolektor.
- Typ zaworu.
- Silniki indukcyjne.
- Synchroniczne.
Silniki zaworów nie są zaliczane do odrębnej klasy, ponieważ ich konstrukcja jest odmianą napędu kolektorowego. Są one zbudowane z elektronicznego falownika i czujnika położenia wirnika. Są one zazwyczaj zintegrowane z płytą sterującą. Służą one do generowania komutacji armatury w sposób skoordynowany.
Silniki synchroniczne i asynchroniczne są wyłącznie silnikami na prąd zmienny. Prędkość jest kontrolowana przez skomplikowaną elektronikę. Silniki indukcyjne można podzielić na:
- Trójfazowy.
- Biphasic.
- Jednofazowy.
Wzór na moc teoretyczną dla silnika trójfazowego w połączeniu gwiazdowym lub trójkątnym
P = 3 * Uф * Iф * cos(alfa).
Jednak dla liniowych wartości napięcia i prądu wygląda to tak
P = 1,73 × Uф × Iф × cos(alfa).
Będzie to realistyczny wskaźnik tego, jak wiele mocy silnik pobiera z sieci.
Silniki synchroniczne dzielą się na:
- Stepper.
- Hybryda.
- Silniki indukcyjne.
- Histereza.
- Reaktywny.
Silniki krokowe zbudowane są z magnesów trwałych, dlatego nie zalicza się ich do osobnej kategorii. Maszyny są sterowane za pomocą przemienników częstotliwości. Istnieją również silniki uniwersalne, które działają na prąd stały i zmienny.
Wspólna charakterystyka silnika
Wszystkie silniki mają wspólne parametry, które są wykorzystywane we wzorze na określenie mocy silnika. Można je wykorzystać do obliczenia właściwości maszyny. W różnych literaturach mogą być różnie nazywane, ale oznaczają to samo. Lista takich parametrów obejmuje:
- Moment obrotowy.
- Moc silnika.
- Wydajność.
- Prędkość nominalna.
- Moment bezwładności wirnika.
- Napięcie obliczeniowe.
- Elektryczna stała czasowa.
Wymienione parametry są przede wszystkim wymagane do określenia sprawności instalacji elektrycznych zasilanych siłą mechaniczną silników. Obliczone wartości dają jedynie przybliżone wyobrażenie o rzeczywistej wydajności produktu. Wartości te są jednak często wykorzystywane we wzorze na moc silnika elektrycznego. To właśnie ona decyduje o wydajności maszyn.
Obrotowy moment obrotowy
Istnieje kilka synonimów tego pojęcia: moment obrotowy, moment obrotowy silnika, moment obrotowy skręcania. Wszystkie są używane do oznaczenia tej samej wartości, choć z punktu widzenia fizyki nie zawsze są identyczne.

W celu ujednolicenia terminologii opracowano standardy, które sprowadzają wszystko do jednego systemu. Z tego powodu w dokumentacji technicznej zawsze jest mowa o "moment obrotowy". Jest to wektorowa wielkość fizyczna, która jest równa iloczynowi wektorowych wartości siły i promienia. Wektor promienia jest rysowany od osi obrotu do punktu przyłożonej siły. Z punktu widzenia fizyki, różnica między momentem obrotowym a momentem rotacyjnym polega na punkcie przyłożenia siły. W pierwszym przypadku jest to siła wewnętrzna, w drugim - zewnętrzna. Mierzone w niutonometrach. Jednak we wzorze na moc silnika moment obrotowy jest używany jako wartość podstawowa.
Oblicza się go jako
M = F × r, gdzie:
M - moment obrotowy, Nm;
F to siła, która ma być przyłożona, H;
r - promień, m.
Do obliczenia znamionowego momentu obrotowego siłownika stosuje się wzór
Mnom = 30Pnom ÷ pi × nnom, gdzie:
Рnom - to moc znamionowa silnika elektrycznego, W;
нNom - Nominalne obroty, min-1.
W związku z tym wzór na moc znamionową silnika elektrycznego wyglądałby następująco:
Rnom = Mnom * pi*nnm / 30.
Zazwyczaj wszystkie dane techniczne są podane w karcie katalogowej. Ale może się zdarzyć, że musi pracować z zupełnie nowymi instalacjami, o których informacje są bardzo trudne do znalezienia. Aby obliczyć parametry techniczne takich urządzeń, bierzemy dane z ich odpowiedników. Również tylko wartości nominalne są zawsze znane i są podane w karcie katalogowej. Dane rzeczywiste należy obliczyć samodzielnie.
Moc silnika
W ogólnym sensie parametr ten jest skalarną wielkością fizyczną, która wyraża się w szybkości zużycia lub konwersji energii systemu. Pokazuje, ile pracy wykonuje maszyna w określonej jednostce czasu. W elektrotechnice charakterystyka przedstawia użyteczną moc mechaniczną na wale centralnym. Dla wskaźnika stosuje się P lub W. Podstawową jednostką miary jest wat. Ogólny wzór na obliczanie mocy silnika elektrycznego można przedstawić jako:
P = dA ÷ dt, gdzie:
A - praca (energia) mechaniczna (użyteczna), J
t - czas, który upłynął, sek.
Praca mechaniczna jest również skalarną wielkością fizyczną, wyrażoną przez działanie siły na obiekt i zależy od kierunku i ruchu tego obiektu. Jest to iloczyn wektora siły przez ścieżkę:
dA = F × ds, gdzie:
s - przebyta odległość, m.
Wyraża on odległość, jaką pokona punkt przyłożonej siły. Dla ruchów obrotowych wyraża się to jako:
ds = r × d(teta), gdzie:
teta - kąt skrętu, rad.
W ten sposób można obliczyć częstotliwość kątową wirnika:
omega = d(teta) ÷ dt.
Z tego wynika wzór na moc na wale silnika: P = M × omega.
Sprawność silnika elektrycznego
Efektywność to cecha, która odzwierciedla wydajność pracy systemu przy przekształcaniu energii w mechaniczną. Wyrażony przez stosunek energii użytecznej do energii wydatkowanej. W jednolitym układzie jednostek oznacza się go jako "eta" i jest bezwymiarową wartością obliczaną jako procent. Wzór na sprawność silnika elektrycznego przez moc:
eta = P2 ÷ P1, gdzie:
P1 - moc elektryczna (wejściowa), W;
P2 - moc użyteczna (mechaniczna), W;
Można ją również wyrazić jako:
eta = A ÷ Q × 100 %, gdzie:
A jest pracą użyteczną, J;
Q jest energią wydatkowaną, J.
Współczynnik ten najczęściej oblicza się ze wzoru na moc pobieraną przez silnik elektryczny, ponieważ zawsze łatwiej jest go zmierzyć.
Zmniejszenie sprawności silnika elektrycznego następuje z powodu:
- Straty elektryczne. Wynika to z nagrzewania się przewodników od przepływającego przez nie prądu.
- Straty magnetyczne. Ze względu na nadmierne namagnesowanie rdzenia występuje histereza i prądy wirowe, co należy uwzględnić we wzorze na moc silnika.
- straty mechaniczne. Jest to związane z tarciem i wentylacją.
- straty dodatkowe. Wynika to z harmonicznych pola magnetycznego, ponieważ stojan i wirnik są ząbkowane. W uzwojeniu występują również wyższe harmoniczne siły magnetomotorycznej.
Należy zauważyć, że sprawność jest jednym z najważniejszych składników wzorów na moc silnika, ponieważ daje liczby jak najbardziej zbliżone do rzeczywistości. Średnio liczba ta waha się od 10% do 99%. Zależy to od konstrukcji mechanizmu.
Prędkość nominalna
Prędkość obrotowa wału jest kolejnym kluczowym parametrem charakterystyki elektromechanicznej silnika. Jest on wyrażony w liczbie obrotów na minutę. Jest on często stosowany we wzorach do obliczania wartości znamionowej silnika pomp, aby podać następujące informacje. Należy jednak pamiętać, że wartość ta jest zawsze inna pomiędzy pracą bez obciążenia i z obciążeniem. Wskaźnik reprezentuje wielkość fizyczną, równą liczbie pełnych obrotów w określonym czasie.
Wzór obliczeniowy dla prędkości obrotowej:
n = 30 × omega ÷ pi, gdzie
n - prędkość obrotowa silnika, obr.
Aby znaleźć moc silnika za pomocą wzoru na prędkość obrotową wału, należy ją przeliczyć na prędkość kątową. Dlatego P = M × omega będzie wyglądać następująco:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), gdzie
t = 60 sekund.
Moment bezwładności
Wartość ta jest skalarną wielkością fizyczną, która odzwierciedla miarę bezwładności ruchu obrotowego wokół własnej osi. Masa ciała to wartość jego bezwładności w ruchu translacyjnym. Zasadniczą cechę parametru wyraża rozkład mas ciała, który jest równy sumie iloczynów kwadratu odległości osi od punktu odniesienia i masy obiektu.W Międzynarodowym Układzie Jednostek Miar jest on oznaczany jako kg-m2 i ma jest obliczany według wzoru:
J = ∑ r2 × dm, gdzie
J - moment bezwładności, kg-m2 ;
m - masa obiektu, kg.
Momenty bezwładności i siły są związane ze sobą zależnością
M - J × epsilon, gdzie
epsilon - przyspieszenie kątowe, s-2.
Liczba ta jest obliczana jako:
epsilon = d(omega) × dt.
Znając więc masę i promień wirnika można obliczyć parametry pracy przekładni. Wzór na wydajność silnika elektrycznego obejmuje wszystkie te cechy.
Naprężenie znamionowe
Nazywany jest również nominalnym. Stanowi on napięcie odniesienia, reprezentowane przez standardowy zestaw napięć, które są określone przez stopień izolacji urządzeń elektrycznych i sieci zasilającej. rzeczywista wartość może się różnić w zależności od maszyny, ale nie może przekraczać wartość graniczna warunki pracy, przeznaczone do ciągłej pracy mechanizmów.
W przypadku normalnych instalacji napięcie znamionowe jest wartością projektową, dla której zostało przewidziane przez projektanta podczas normalnej pracy. Wykaz standardowych napięć sieciowych znajduje się w GOST. Parametry te są zawsze opisane w charakterystyka techniczna mechanizmy. Do obliczenia pojemności wykorzystuje się wzór na wydajność prądową silnika elektrycznego:
P = U × I.
Elektryczna stała czasowa
Reprezentuje czas, konieczny dla osiągnięcie poziomu prądu 63 % po podaniu napięcia na uzwojenie napędu. Parametr ten wynika z elektromechanicznych stanów przejściowych, ponieważ są one przejściowe ze względu na duże rezystancje. Ogólny wzór na obliczanie stałej czasowej:
te = L ÷ R.
Jednak elektromechaniczna stała czasowa tm zawsze większe niż t elektromagnetycznee. Pierwszy parametr otrzymuje się z równania charakterystyki dynamicznej silnika w warunkach, gdy wirnik rozpędza się z zerową prędkością do maksymalnej prędkości jałowej. W tym przypadku równanie przyjmuje postać
M = Mst + J × (d(omega) ÷ dt), gdzie
Mst = 0.
Z tego wyprowadzamy wzór:
M = J × (d(omega) ÷ dt).
Elektromechaniczna stała czasowa jest obliczana na podstawie momentu rozruchowego - Mп. Mechanizm pracujący w idealnych warunkach, o charakterystyce prostoliniowej będzie miał wzór:
M = Mп × (1 - omega ÷ omega0), gdzie
omega0 - prędkość obrotowa biegu jałowego.
Obliczenia te są wykorzystywane we wzorze na moc silnika pompy, gdzie skok tłoka jest bezpośrednio związany z prędkością obrotową wału.
Podstawowe wzory do obliczania mocy silnika
Aby obliczyć rzeczywistą charakterystykę mechanizmów, należy zawsze uwzględnić wiele parametrów. w pierwszej kolejności musi być znany, prąd dostarczany do uzwojeń silnika: stały lub zmienny. ich zasada działania jest inna, stąd też metoda obliczania jest inna. Jeśli uproszczona forma obliczania mocy napędu wygląda jak:
Pel = U × I, gdzie
I to amperaż, A;
U - napięcie, V;
Pel - zasilanie elektryczne. W.
We wzorze na moc silnika elektrycznego prądu zmiennego należy uwzględnić przesunięcie faz (alfa). Odpowiednio, obliczenia dla Jak wyglądają silniki asynchroniczne:
Pel = U × I × cos(alfa).
Oprócz mocy czynnej (wstrzykiwanej) występuje również:
- S - reaktywny, VA. S = P ÷ cos(alfa).
- Q - total, VA. Q = I × U × sin(alfa).
W obliczeniach należy również uwzględnić straty termiczne i indukcyjne oraz tarcie. Dlatego uproszczony wzór modelowy dla silnika prądu stałego wygląda następująco
Pel = Pmech + Ptep + Rind + Ptr, gdzie
Rmeh - moc efektywna generowana, W;
Ptep - straty wytwarzania ciepła, Wt;
Rind to koszt ładunku w cewce indukcyjnej, W;
Pt - straty tarcia, W.
Wniosek
Silniki elektryczne są stosowane w prawie wszystkich dziedzinach życia człowieka: w domu, w przemyśle. Aby prawidłowo użytkować napęd, należy znać nie tylko jego charakterystykę nominalną, ale także wartości rzeczywiste. Zwiększy to jego efektywność i zmniejszy koszty.
 Przekaźniki: rodzaje, klasyfikacja, funkcje i zasada działania
Przekaźniki: rodzaje, klasyfikacja, funkcje i zasada działania Obliczanie mocy silnika: wymagane metody i wzory
Obliczanie mocy silnika: wymagane metody i wzory Podstawowe formy rozliczeń bezgotówkowych: pojęcie, rodzaje, klasyfikacja i dokumentacja
Podstawowe formy rozliczeń bezgotówkowych: pojęcie, rodzaje, klasyfikacja i dokumentacja Klasyfikacja praw: definicja pojęcia, podstawowe rodzaje i normy
Klasyfikacja praw: definicja pojęcia, podstawowe rodzaje i normy Vat w cłach: rodzaje, sposób obliczania i zwrotu
Vat w cłach: rodzaje, sposób obliczania i zwrotu Okres trwałości mleka w proszku: skład, rodzaje i klasyfikacja
Okres trwałości mleka w proszku: skład, rodzaje i klasyfikacja Programowanie asynchroniczne: rodzaje, klasyfikacja, zasady programowania, pojęcie, znaczenie i zastosowanie
Programowanie asynchroniczne: rodzaje, klasyfikacja, zasady programowania, pojęcie, znaczenie i zastosowanie Klasyfikacja klimatów: rodzaje, metody i zasady podziału, cel podziału na strefy
Klasyfikacja klimatów: rodzaje, metody i zasady podziału, cel podziału na strefy Środki reklamy: rodzaje, cechy, klasyfikacja i techniki
Środki reklamy: rodzaje, cechy, klasyfikacja i techniki